Далеко не всегда удается произвести тест серводрайвера на двигателе. Причин этому несколько. Зачастую для серводрайвера требуется специальный двигатель с определенным энкодером. Требуется управление по определенному интерфейсу с использованием либо сервисных программ, либо заранее запрограммированного ПЛК.
В данном случае заказчик предоставил для теста двигатель MKD071-2A853
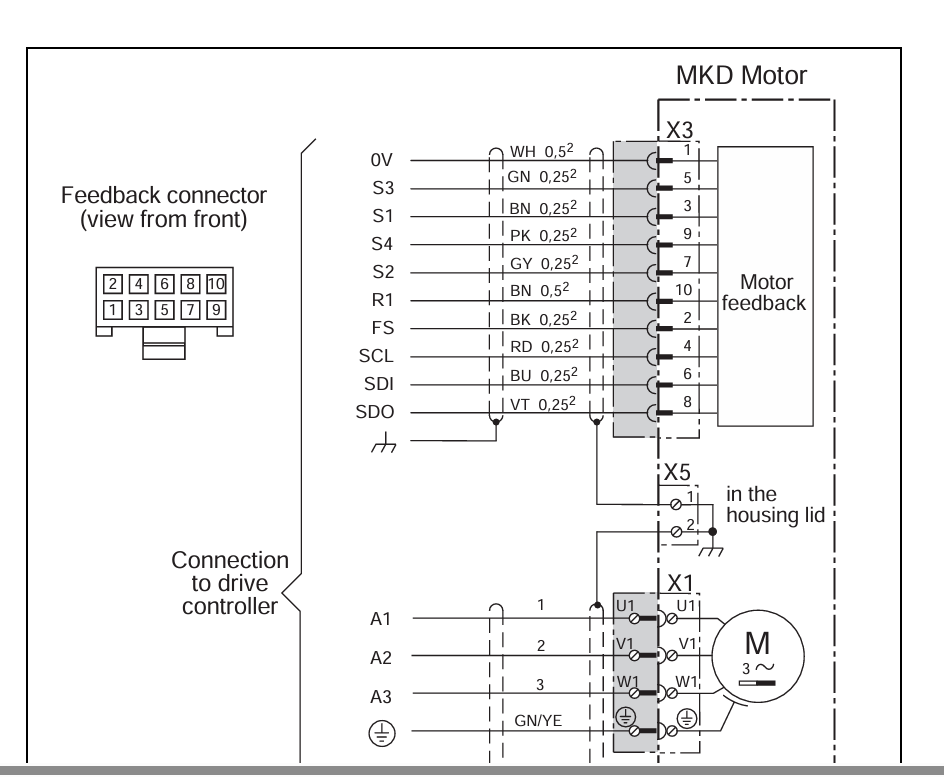
Распиновка разъема обратной связи со стороны двигателя:
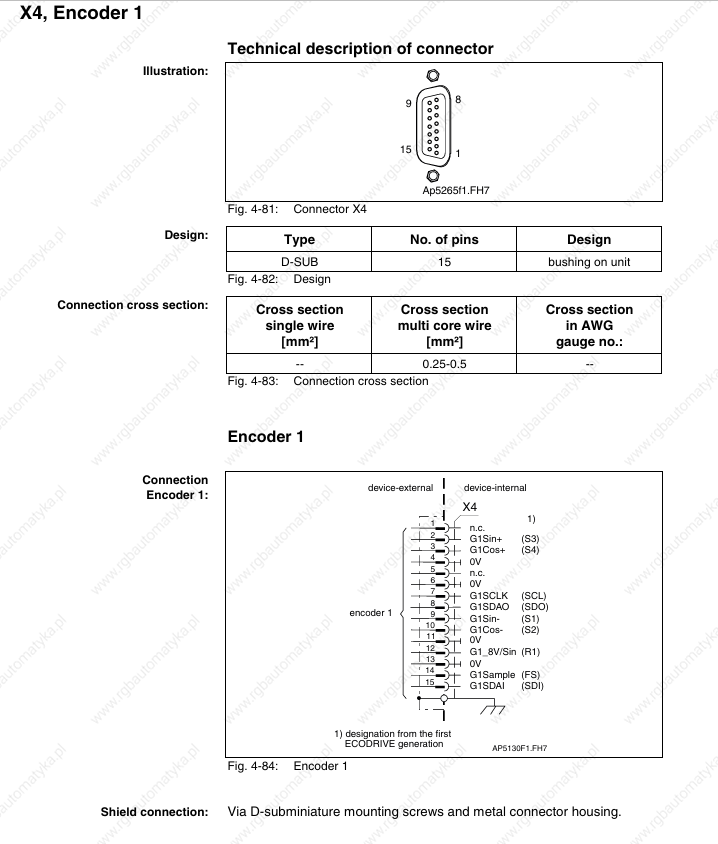
Ответная часть на серводрайвере:
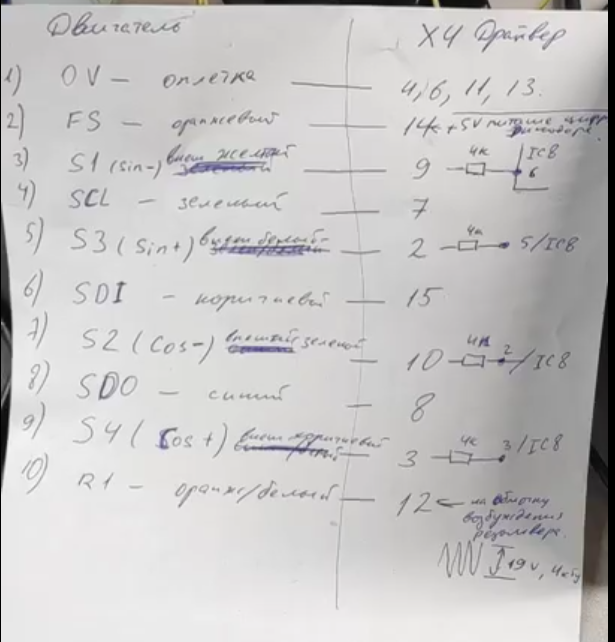
Был изготовлен кабель связи согласно распиновкам выше. Поясняющая записка к кабелю:
Подготовительные подключения:
- Питание серводрайвера +24V 1A на разъем X1 контакт 1
- Ноль питания на разъем X1 контакт 2
- Сигнал «Drive halt» — остановка движения — разъем X1 контакт 3 — нулевой потенциал (проверить!)
- Сигнал «Drive Enable» — разрешение работы — разъем X1 контакт 4 + 24V
- Подключить термодатчик двигателя ( Контакты на колодке двигателя T1,T2) к разъему X3 контакты 1,2
- Энкодер двигателя — к разъему X4, распиновка описана выше.
- Связь по COM порту — разъем X2 , пины 2,3 — RX/TX (нульмодемный), 7- земля
- Силовые двигателя к A1, A2, A3 разъема X5
- Силовое питание драйвера 380 В 3 Ф — L1, L2 , L3 разъема X5
Для связи с компьютером была использована программа DriveTop16V14
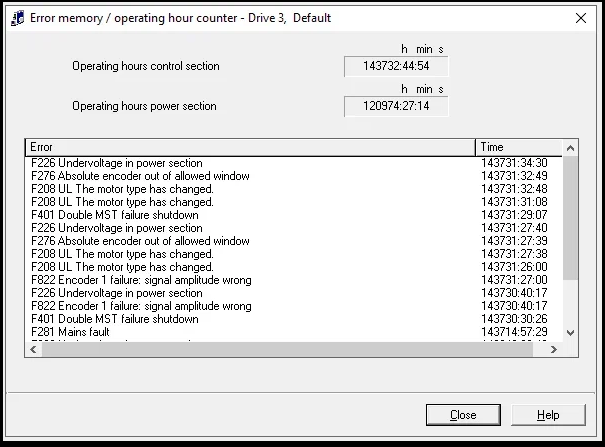
История ошибок:
Получена исходная конфигурация: 1H956_all_drive_top_format
Порядок работы:
- Включить контрольное питание.
- Запустить программу DriveTop. Установить соединение с драйвером.
- Добиться готовности драйвера (статус bb) путем сброса ошибок кнопкой на самом драйвере, это состояние готовности будет отоброжаться статусом «A013 Ready to power on» в программе.
- Подать силовое питание 380В.
- При появлении ошибки F226 (under voltage in power section) — сбросить эту ошибку в программе в окне статуса или кнопкой на устройстве.
- Убедиться в переходе устройства в статус Ab «A012 Control and power sections are ready for operations».
- Выключить и включить сигнал «Drive enable», убедиться, что статус изменился на AF «A101 Drive in Velocity control», появился высокочастотный писк ШИМ токов, вал двигателя перешел на удержании позиции.
- В меню Setup -> Single parameter -> S0036 задать скорость вращения, например, 100 об/мин, нажать Enter на клавиатуре. Убедиться во вращении вала двигателя.
- Изменить значение параметра на отрицательную величину, например, -100 об/мин, нажать Enter на клавиатуре. Убедиться во вращении вала двигателя в обратную сторону.
- Остановить движение отключением сигнала Drive enable, отключиь силовое и затем контрольное питание. Тест завершен.
Видеоотчет о тестировании:
https://disk.yandex.ru/i/IbE4bJDS2xlmkw
Важная информация:
Измеренное напряжение контура DC — параметр P-0-4015
Коэффициент усиления прямопропорциональный в петле обратной связи в режиме управления скоростью : S-0-0106
Уставка скорости — параметр S-0-0036
Информация по двигателям MKD: 272495_digital_ac_motors_mkd_project_planning_dok_motor_mkd_pr05_indramat
Информация по серводрайверу, распиновки разъемов, подключениям и т.д. :
dkc023-100-7-fw-eco-drive-indramat-rexroth-manual-1 (2)
Мануал по использованию программы DriveTop:
274132_ecodrive_dkc03.1_drive_controller_dok_ecodrv_pdp_03vrs_fkb1_indramat.pdf
Фотозаметки о Rexroth DKC02.3-040-7-FW : https://disk.yandex.ru/a/dRQNif-2aWmKmg
Аналогичное тестирование на двигателе, но для Rexroth DKC02.3-016-7 показано тут.