При первом ремонте этого серводрайвера не было выполнено качественное выходное тестирование. Недостаточно было удовлетвориться удержанием положения вала двигателя на нулевой скорости, но надо было добиться вращения вала в обе стороны и, желательно, на разных скоростях.
При включении движения на стороне заказчика сработали автоматы защиты. При вскрытии обнаружено повреждение силового модуля SEMIKRON SKiiP 22NAB12T18:
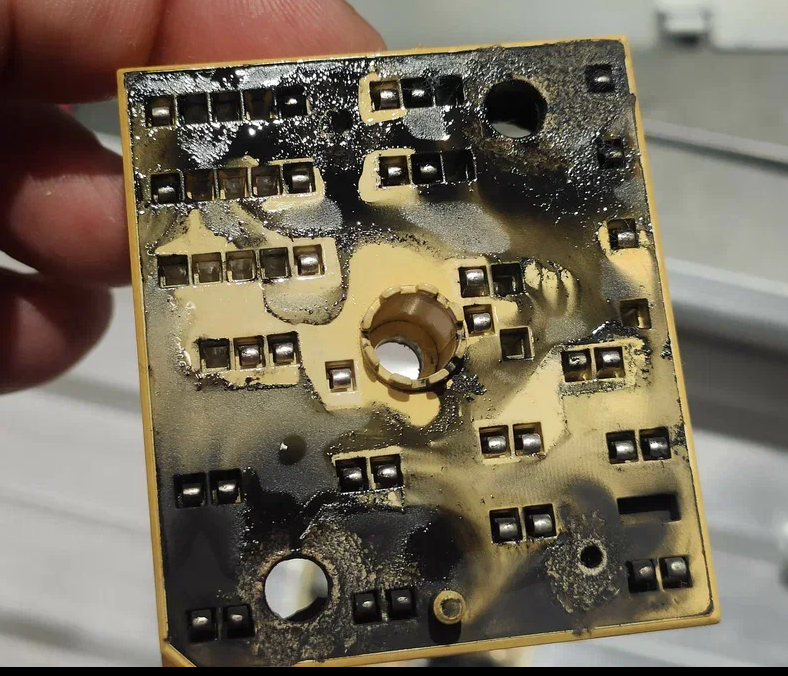

Замена силового модуля с оптодрайверами A314J и резисторами 50 Ом обвязки не привела к исправному состоянию. При старте движения новый силовой модуль пострадал аналогично, хотя и с меньшими визуальными последствиями благодаря примененным быстродействующим плавким вставкам в цепи силового питания:
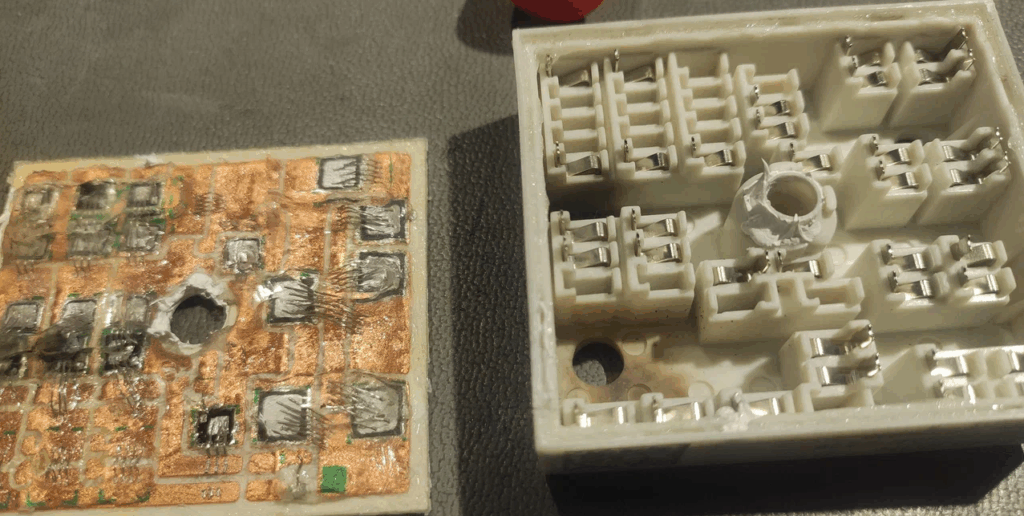
Явно видно повреждение одного транзистора в нижнем плече по шине V.
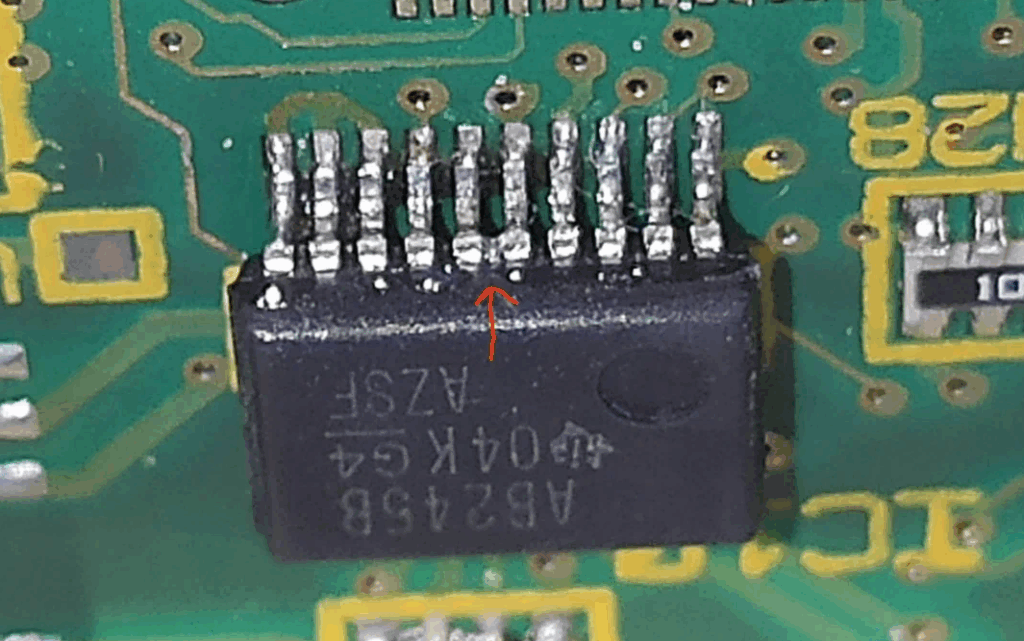
Поиск причины неисправности привел к замененной при первом ремонте микросхеме AB245B:
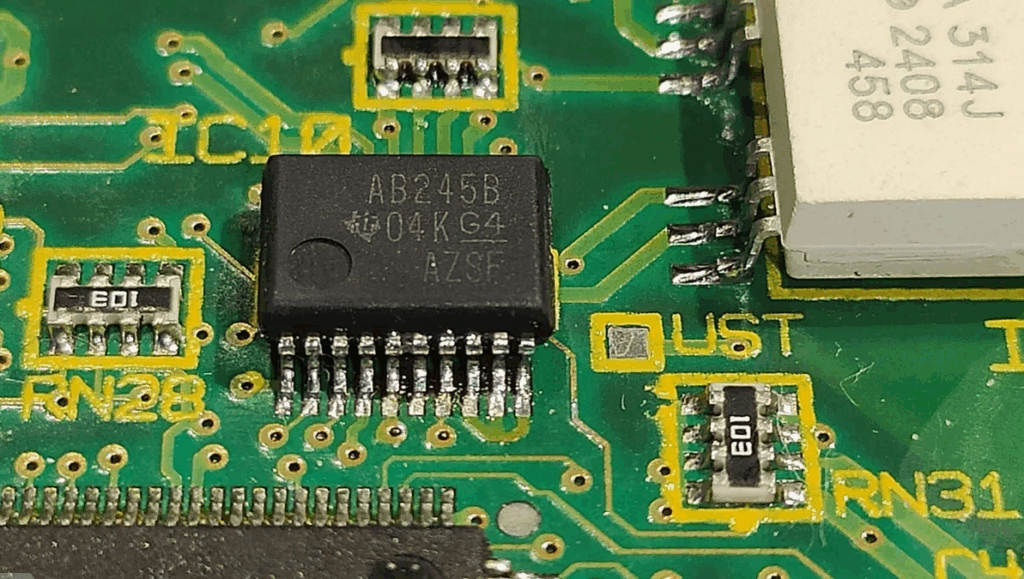
Не сразу удалось выявить замыкание между 5-й и 6-й ножкой, образовавшимся при монтаже пайкой.
Вот эта перемычка:
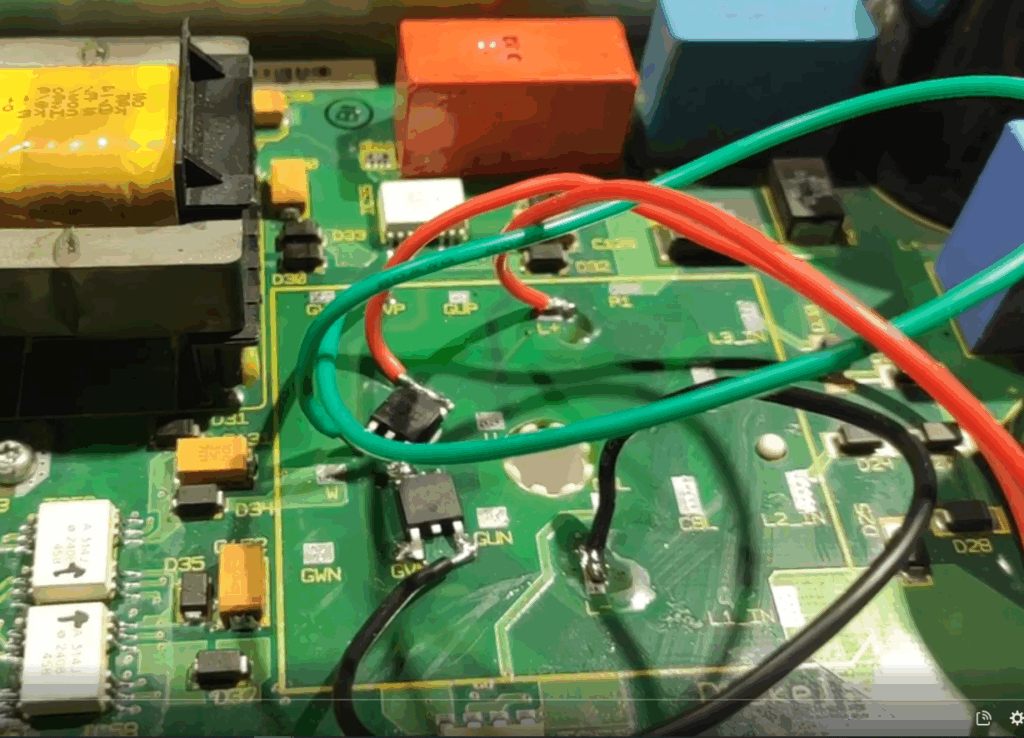
Новый силовой модуль заказан, но чтобы убедиться в исправности всего остального, решено исключить сгоревшие транзисторы из силового модуля и временно заменить их аналогами навесным монтажом на верхней стороне платы:
По аналогии с уже опубликованным методом тестирования серводрайвера Rexroth с применением программы DriveTOP приступим к подготовке.
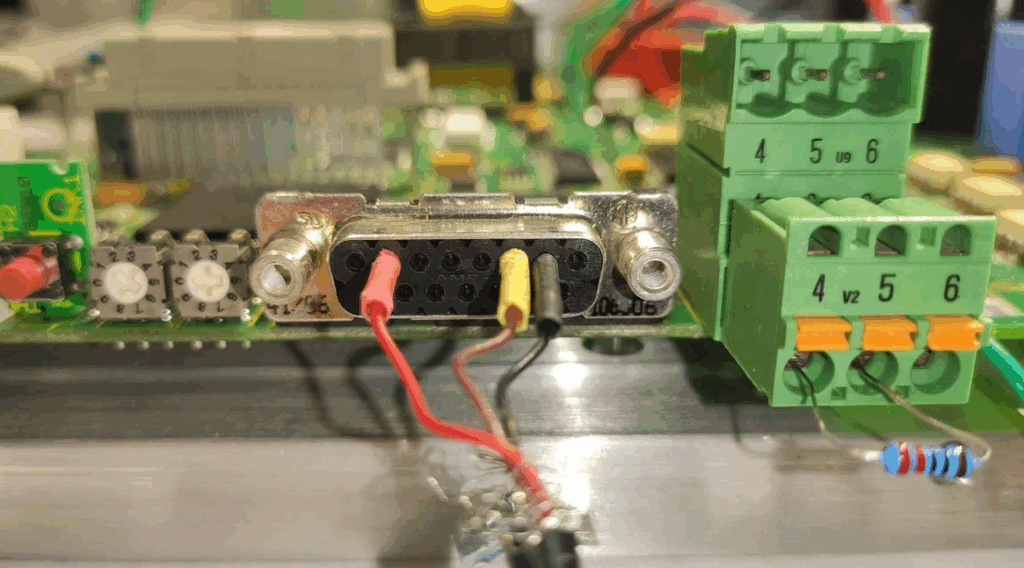
На разъем X1 подключим +24В на 1-й контакт, 0В — на 2-й контакт, на 3-й Drive Halt (+24V), на 5-й Drive Enable (+24V). На разъем X4 — сигналы с энкодера двигателя:
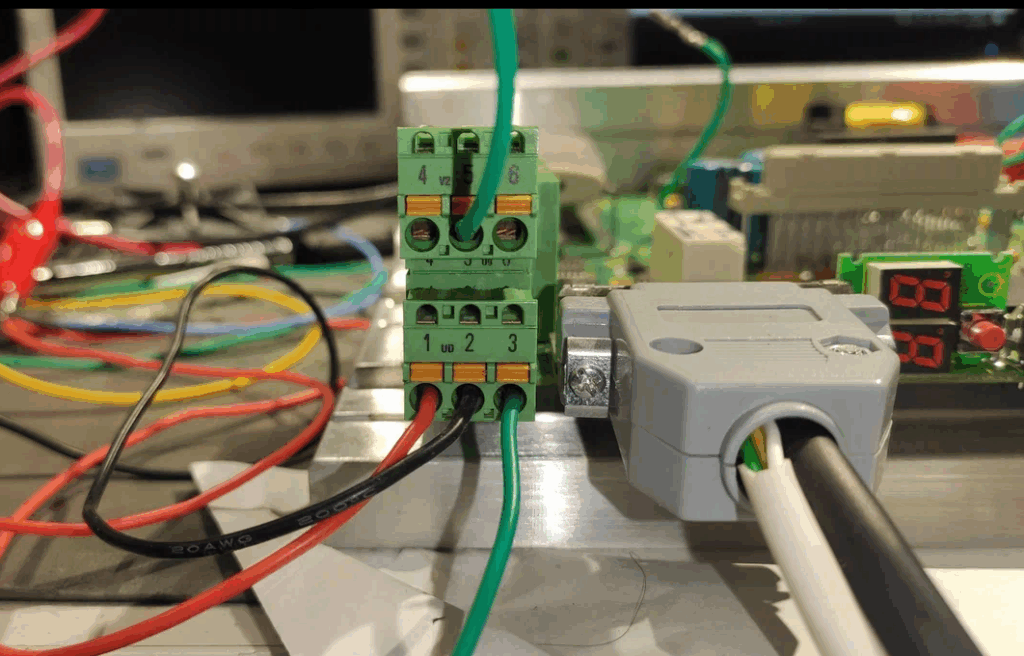
На разъем X2 Com 2, 3- й контакты подаем сигналы RX/TX COM порта (нульмодемное подключение), на 7-й контакт — нулевой потенциал.
На разъем X6 к контактам 1, 2 подключаем термодатчик двигателя или его эмулятор, резистор 220-250 Ом.
Подключаем и проводим тестирование как на видео:
Полезная информация:
Мануал Rexroth DKCXX.3-016
EEPROM Rexroth DKC02.3-016-7-FW ( Atmel 24C16, предоставление по запросу)
Некоторые фотографии Rexroth DKC02.3-160-7-FW
Окончательный тест после замены силового модуля: https://disk.yandex.ru/i/kjxoO39bCMrE3g
Также был исследован двигатель Rexroth MKD071B-035-KP0-KN и его резольвер.
Спасибо за внимание!